计算机视觉
3周实验,1周报告
1 图像处理基础
1-1 图像定义
- 图像:二维函数
- 数字图像:由像素构成
- 用二维矩阵描述
- 像素值为整数
- 原点为左上角
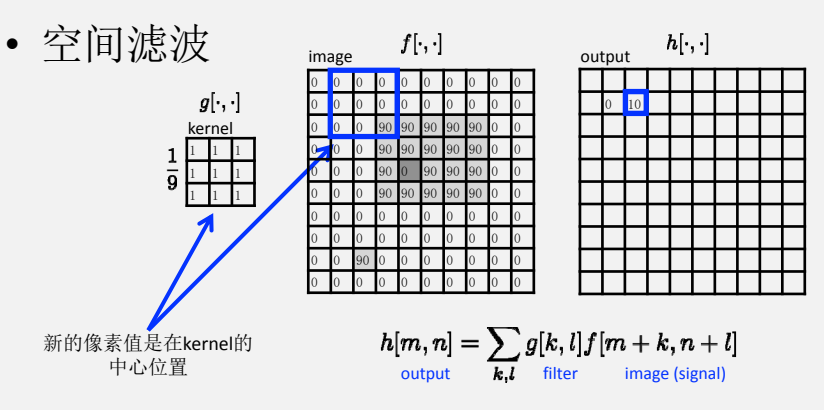
1-2 空间滤波
图像 * 模板
1-3 空间滤波的应用
边缘检测
- 图像梯度
- 通过梯度计算边缘点
1-4 Hough 变换
Hough 变换原理:
- 利用图像空间和 Hough 参数空间的点-线对偶性
- 把图像空间中的检测问题转换到参数空间
- 通过检测参数空间中的极值点来估计该曲线的参数
直线
参数空间:y=mx+b,m和b为变量,x和y为参数
由此每个点(x, y)对应一条参数空间m,b上的直线
直线拟合: 多个点则得到多条参数空间中的直线,获得一或多个交点。 相交最多的参数交点即为拟合得到的直线。
还可以用极坐标:
| 方程式 | 参数空间 | |
|---|---|---|
| 斜截式 | m, b | |
| 极坐标 | θ, ρ |
圆
若圆的半径未知,参数空间是圆锥
| 方程式 | 参数空间 | |
|---|---|---|
| 半径已知 | a, b | |
| 半径未知 | a, b, r |
2 相机与成像模型
2-1 小孔成像
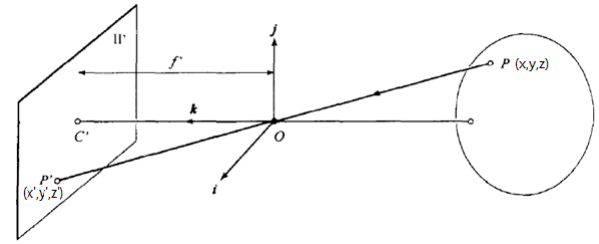
透视投影方程:(相似三角形)
三点共线
2-2 成像特点
- 近大远小
- 不保持平行性:平面上的平行线在像平面上可能相交(铁轨)
聚焦条件:
变焦:改变焦距(移动镜头组中镜片的相对位置)
对焦:让像成在底片上,通常移动镜头来实现
薄透镜:透镜厚度在计算中可忽略不计
3 相机标定
相机标定:求解 3D 到 2D 的映射的参数
相机的几何模型:
3-1 齐次坐标
用 n+1 维向量表示 n 维向量:
- 原坐标
- 齐次坐标
平面:
球面:
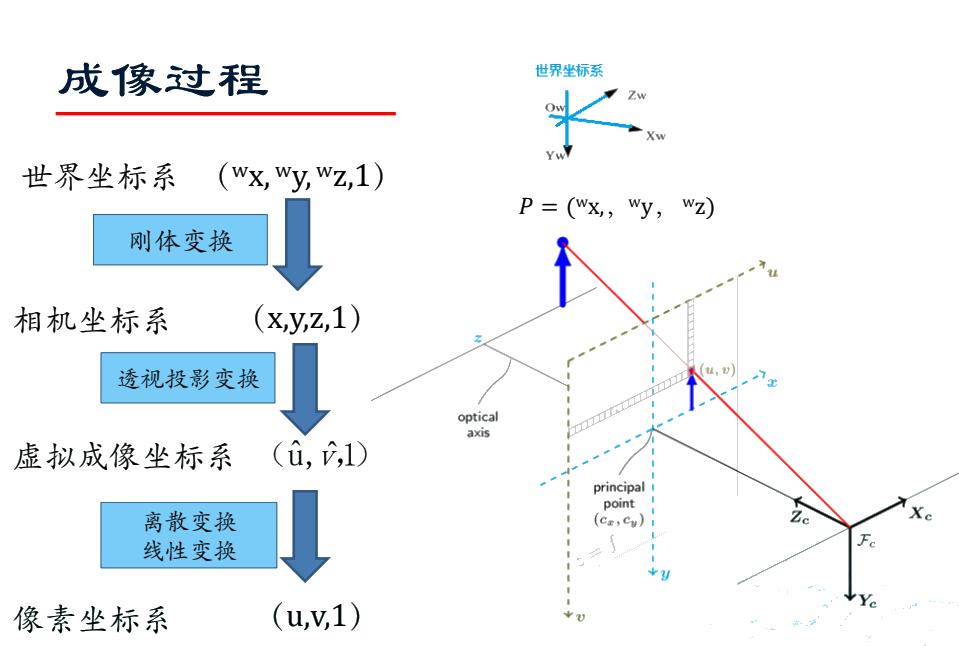
3-2 坐标系变换
世界坐标系,相机坐标系,
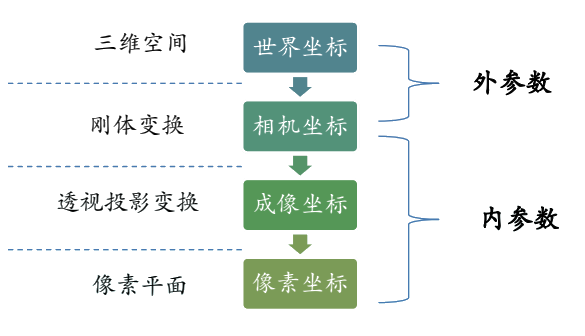
两个几何变换:
- 从世界坐标系到相机坐标系的刚体变换(相机的外参数)
- 从相机坐标系中三维坐标到成像平面上二维坐标的透视投影变换(相机的内参数)
刚体变换
刚体:形状、大小不变,内部各点的相对位置不变
刚体变换:把刚体做旋转、平移等坐标变换
是两个正交坐标系间的变换
- 平移变换:
- 旋转变换:
- 例如坐标系 A 绕 k 轴旋转:
- 通用旋转矩阵:
- 刚体变换:
下标指示被表示的对象,上标指示用来表示对象的坐标系, 如是坐标系 A 下 P 的表示,是坐标系 A 在坐标系 B 中的旋转矩阵。
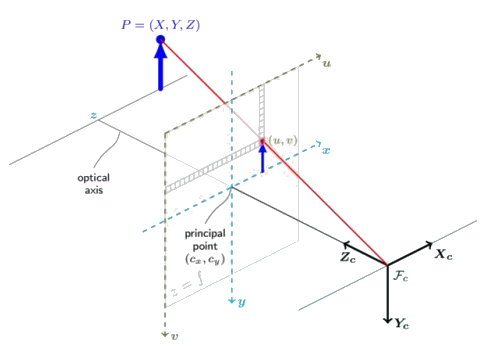
3-3 相机建模
虚拟成像平面:与物理成像平面平行,在光轴上距光心为 f
像素坐标尺度内参外参世界坐标
注意:r 为三维列向量
歪斜角 :相机传感器非矩形而是平行四边形
像素纵横系数:,将虚拟成像平面映射到物理成像平面(像素坐标系)
3-4 参数求解
最小二乘法
当 时,最小化误差函数 E
若 y 均为0,则为齐次方程,解为 的最小特征根所对应的特征向量
算法步骤
- 物点的世界坐标,像点的像素坐标)经由多组数据的最小二乘法,得到(矩阵 M 的 12 个元素值)
- 再算出相机的内外参数之积 M
计算 M
令 ,有 , 得
将 n 组点代入(即 n 个 u,v,P)
转为齐次方程:
则得 为矩阵 最小特征根对应的特征向量 其中 ρ 为齐次方程的系数。由此解出 M。
,且 ,
其中 ε 表征物体与相机是否在世界坐标系的同一侧(1 为同)
估计参数
4 图像配准
4-1 图像配准
- 图像配准可以视为源图像 I2 和目标图像 I1 关于空间和灰度的映射关系: 其中: f 为二维空间坐标变换(如仿射变换),g 为灰度变换。
- 图像配准问题的关键:最佳几何变换 f
- 选取图像特征
- 估计几何变换
图像配准的模式分类
- 按自动化程度分类:
- 人工配准方法
- 半自动方法
- 全自动方法
- 按成像模式分类:
- 不同视角(多视角分析)
- 不同时间(多时段分析)
- 不同传感器(多模式分析)
- 场景与场景模型图像配准
- 按图像配准的应用领域分类
- 医学、遥感、计算机视觉、军事等领域
- 按图像的维数分类
- 2D-2D、2D-3D、3D-3D
- 按对图像信息的利用情况分类
- 基于灰度信息
- 基于特征信息
4-2 图像预处理
4-2-1 图像的灰度变换
- 线性灰度变换
- 对数灰度变换
- 分段线性灰度变换
- 直方图的均衡化
4-2-2 图像的平滑处理
- 邻域平均法
- 中值滤波
4-3 图像配准
4-3-1 主要方法
基于灰度的图像配准
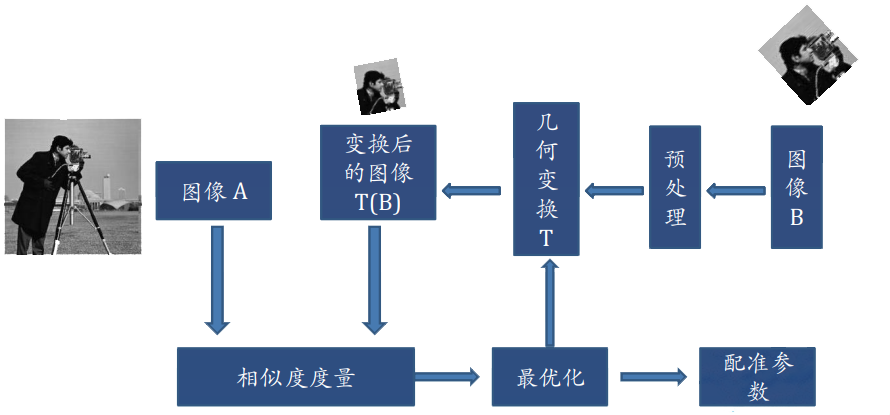
基于特征的图像配准
- 特征提取
- 特征匹配
- 通过特征估计变换模型
- 图像重采样
图像配准的核心模块
- 特征选取
- 充分表达图像的内部结构
- 消除畸变噪音的干扰
- 降低参与计算的数据量
- 几何变换的选取
- 选择合适的几何变换
- 搜索策略
- 动态规划、牛顿法、最速下降法、共轭梯度法
- 相似度度量
4-3-2 特征选取
- 找到图像特征点
- 特征点配对
- 图像拼接:通过匹配的特征点,估计参数
角点检测
- 角点:像素值变化剧烈的点
- 定义移动窗口的像素变化值
- W 为窗口
- 移动量为 (u,v)
- 窗口内像素变化函数
Harris 角点检测
- 假定窗口滑动微小,图像平滑,则通过泰勒展开
则:
圆括号内的 求和 记为矩阵 H
根据特征值的计算公式:
得到H的两个特征值:
-
几何关系
- 表示 E 的最大变化分量
- 征表示 E 的最小变化分量
- 在方向的增量值
- 在方向的增量值
-
平坦区域: 和 都很小
-
边缘区域: 大, 小
-
角点区域: 和 都很大
Harris 算子
Harris 无需计算特征值,算子大则检测到角点。
4-3-3 特征描述
SIFT描述子
- 提取图像的局部特征
- 具有平移、旋转、伸缩不变性
- 对光照变化、仿射变换和三维投影变换具有一定的鲁棒性
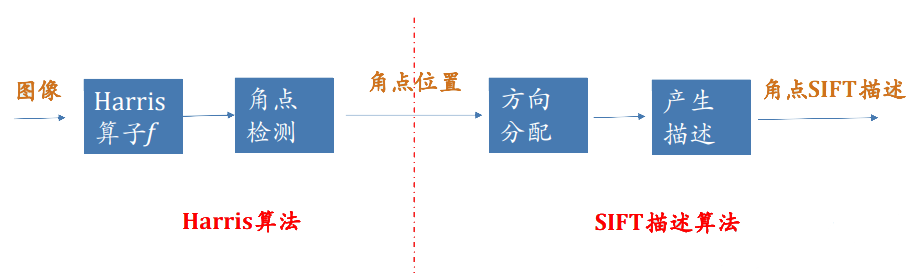
SIFT描述子产生过程
- 方向分配
- 在关键点为中心的邻域窗口,计算每个点的梯度
- 用直方图统计邻域像素的梯度方向分布(每10度为一个统计区间)
- 最大的梯度所在的方向即为关键点的主方向
- 产生描述
- 将坐标轴旋转为关键点的主方向,确保旋转不变性
- (以窗口长度为8为例)
- 根据预设的尺度与角度,在特征点附近取窗口
- 获得窗口内每点的梯度
- 将原始窗口分为2×2共4个子窗口,计算每个窗口内的梯度直方图(仅考虑8个方向)
- 这2×2×8共32个数值(4个直方图),获得特征描述
- 归一化以消除光照影响
4-3-4 特征匹配
- 设特征 和 是与特征 最近和次近的特征
- 计算距离比例
- 当r小于某个阈值,则匹配成功
- 阈值的选取需根据图像确定(建议范围:0.4到0.8)
由于图片角点十分多,因此需要用 K-d 树等数据结构来加速
K-d 树略